Detailed Description
The purpose of the Network Redundancy Layer (NRL) is the duplication of CAN frames between the application and the CAN interfaces for transmission, as well as the de-duplication of CAN frames between the CAN interfaces and the application for reception. As such, the CAN traffic on both CAN lines is intended to be identical.
The NRL functions provide an additional layer between an existing CANpie FD driver that supports at least two physical CAN interfaces and an application using the API (e.g. CANopen or J1939). From the application point of view no changes of the existing CANpie FD API have to be considered.
The NRL is initialized with the function CpNrlRegisterDriver(). This function will setup the internal driver structure, but not initialise the CAN controller, configure a certain bit-rate nor switch the CAN controller to active operation. The following core functions must be called in that order:
The NRL configuration options allow to change options during compilation of the NRL.
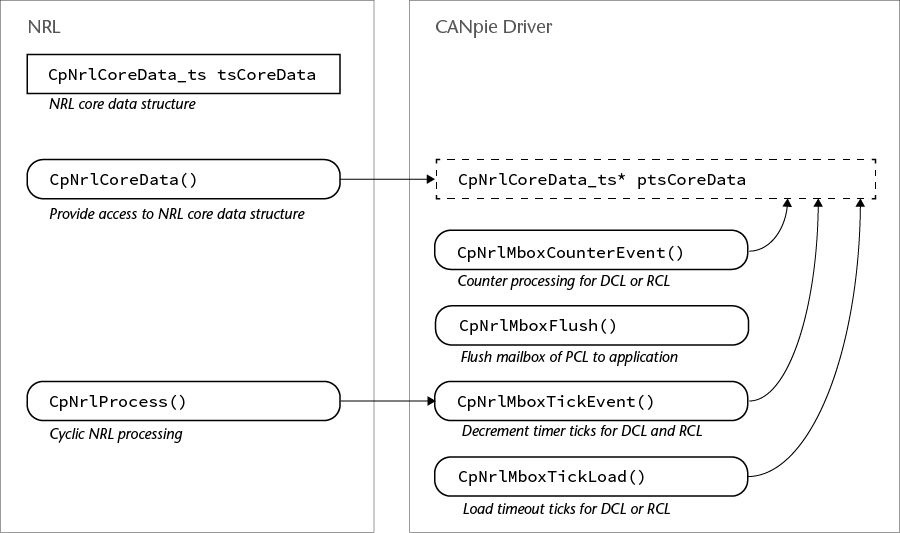
Interface between NRL and CANpie FD driver
The following diagram gives an overview to functions used for providing a defined interface between the NRL and a CANpie FD driver.
Using the NRL in non-redundant mode
The NRL can be started in non-redundant mode, i.e. only one CAN interface is used for communication. This mode allows the application to disable the functionality of the NRL during run-time. In non-redundant mode the NRL is a transparent layer between the CANpie FD driver and the application. The non-redundant mode is started by passing a value of eCP_CHANNEL_NONE for the physical interface of Redundant CAN Line upon registration.
 Include dependency graph for cp_nrl.h:
Include dependency graph for cp_nrl.h: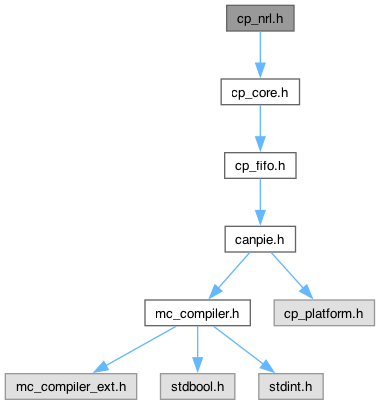
Data Structures | |
| struct | CpNrlDriver_s |
| struct | CpNrlState_s |
| struct | CpNrlCoreData_s |
Macros | |
| #define | CP_NRL_TIMER_PERIOD 1000 |
| #define | CP_NRL_SUPPORT 0 |
| #define | CP_NRL_FAULT_SIMULATION 0 |
| #define | CP_NRL_VERSION_MAJOR 1 |
| #define | CP_NRL_VERSION_MINOR 17 |
| #define | CP_NRL_VERSION_BUILD 0 |
| #define | CP_NRL_DEVIATION_LIMIT_MAX 10 |
Typedefs | |
| typedef void(* | CpNrlStateHandler_Fn) (uint8_t ubNrlStateV) |
Enumerations | |
| enum | CpNrlChannel_e { eCP_NRL_CHANNEL_NONE = 0 , eCP_NRL_CHANNEL_1 = 1 , eCP_NRL_CHANNEL_2 = 2 , eCP_NRL_CHANNEL_LIMIT = eCP_NRL_CHANNEL_NONE } |
| enum | CpNrlFault_e { eCP_NRL_FAULT_NONE = 0 , eCP_NRL_FAULT_DISCONNECT_DCL , eCP_NRL_FAULT_DISCONNECT_RCL , eCP_NRL_FAULT_DISCONNECT_ALL } |
| enum | CpNrlLine_e { eCP_NRL_LINE_DCL = 0 , eCP_NRL_LINE_RCL = 1 , eCP_NRL_LINE_NONE = 2 } |
| enum | CpNrlState_e { eCP_NRL_STATE_INIT = 0 , eCP_NRL_STATE_ACTIVE = 1 , eCP_NRL_STATE_PASSIVE = 2 , eCP_NRL_STATE_DISABLED = 3 , eCP_NRL_STATE_DISCONNECTED = 4 , eCP_NRL_STATE_NON_REDUNDANT = 5 } |
Functions | |
| int16_t | CpNrlMboxCounter (uint8_t ubNrlChannelV, uint8_t ubBufferIdxV) |
| bool_t | CpNrlMboxCounterEvent (uint8_t ubPhyIfV, uint8_t ubBufferIdxV) |
| bool_t | CpNrlMboxFlush (CpPort_ts *ptsPortV) |
| void | CpNrlMboxTickEvent (void) |
| bool_t | CpNrlMboxTickLoad (uint8_t ubPhyIfV, uint8_t ubBufferIdxV) |
| CpNrlCoreData_ts * | CpNrlCoreData (uint8_t ubPhyIfV) |
| CpStatus_tv | CpNrlRegisterDriver (uint8_t ubNrlChannelV, uint8_t ubPhyIfDclV, uint8_t ubPhyIfRclV, CpNrlDriver_ts *ptsNrlDriverV) |
| CpStatus_tv | CpNrlRegisterHandler (uint8_t ubNrlChannelV, CpNrlStateHandler_Fn pfnStateHandlerV) |
| CpStatus_tv | CpNrlRegisterConnectionService (uint8_t ubNrlChannelV, uint32_t ulIdentifierV, uint8_t ubFormatV) |
| CpStatus_tv | CpNrlSendConnectionService (uint8_t ubNrlChannelV) |
| CpStatus_tv | CpNrlSetDeviationLimit (uint8_t ubNrlChannelV, uint8_t ubLimitV) |
| CpStatus_tv | CpNrlSetRecoveryTime (uint8_t ubNrlChannelV, uint32_t ulMicroSecondsV) |
| CpStatus_tv | CpNrlSetTimeout (uint8_t ubNrlChannelV, uint32_t ulMicroSecondsV) |
| CpStatus_tv | CpNrlState (uint8_t ubNrlChannelV, CpNrlState_ts *ptsStateV) |
| void | CpNrlTimerEvent (uint8_t ubNrlChannelV) |
Variables | |
| CpNrlDriver_ts | tsNrlDriverG |
Macro Definition Documentation
◆ CP_NRL_DEVIATION_LIMIT_MAX
| #define CP_NRL_DEVIATION_LIMIT_MAX 10 |
This symbol defines the maximum value which can be used for the deviation limit (refer to CpNrlSetDeviationLimit).
Typedef Documentation
◆ CpNrlStateHandler_Fn
| typedef void(* CpNrlStateHandler_Fn) (uint8_t ubNrlStateV) |
Handler for NRL state machine change event.
- Parameters
-
[in] ubNrlStateV Current state of NRL
Enumeration Type Documentation
◆ CpNrlChannel_e
| enum CpNrlChannel_e |
NRL channel definitions.
A CAN device can have up to two logical NRL channel, each having two physical CAN interfaces. In default configuration (#CP_NRL_CHANNEL_MAX = 0) the value of eCP_NRL_CHANNEL_LIMIT is set to eCP_NRL_CHANNEL_NONE, otherwise it is set to the appropriate enumeration value.
| Enumerator | |
|---|---|
| eCP_NRL_CHANNEL_NONE | NRL channel invalid |
| eCP_NRL_CHANNEL_1 | NRL channel 1 |
| eCP_NRL_CHANNEL_2 | NRL channel 2 |
| eCP_NRL_CHANNEL_LIMIT | NRL channel limit, marks the end of the enumeration |
◆ CpNrlFault_e
| enum CpNrlFault_e |
NRL fault simulation definitions.
The values of the enumeration CpNrlFault_e are used to simulate fault conditions using the function CpNrlFaultSimulation().
The NRL fault simulation is only available if the symbol CP_NRL_FAULT_SIMULATION is set to 1.
| Enumerator | |
|---|---|
| eCP_NRL_FAULT_NONE | No fault |
| eCP_NRL_FAULT_DISCONNECT_DCL | Fault on DCL |
| eCP_NRL_FAULT_DISCONNECT_RCL | Fault on RCL |
| eCP_NRL_FAULT_DISCONNECT_ALL | Fault on both lines |
◆ CpNrlLine_e
| enum CpNrlLine_e |
◆ CpNrlState_e
| enum CpNrlState_e |
NRL state definitions.
The values of the enumeration CpNrlState_e are used to define the active NRL state.
Function Documentation
◆ CpNrlCoreData()
| CpNrlCoreData_ts * CpNrlCoreData | ( | uint8_t | ubPhyIfV | ) |
- Parameters
-
[in] ubPhyIfV Physical interface
- Returns
- Pointer to CpNrlCoreData_ts structure
The function returns a pointer to the CpNrlCoreData_ts structure for the physical CAN interface defined by ubPhyIfV.
The function is required by the CANpie FD driver and shall not be used by the Higher Layer Protocol.
◆ CpNrlMboxCounter()
| int16_t CpNrlMboxCounter | ( | uint8_t | ubNrlChannelV, |
| uint8_t | ubBufferIdxV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ubBufferIdxV Buffer number
- Returns
- Mailbox counter value
The function returns the current mailbox counter value of the mailbox number defined by the value of ubBufferIdxV. In case the parameter ubNrlChannelV or ubBufferIdxV are out of range the function will return CP_NRL_MAILBOX_COUNTER_UPPER_LIMIT + 1.
◆ CpNrlMboxCounterEvent()
| bool_t CpNrlMboxCounterEvent | ( | uint8_t | ubPhyIfV, |
| uint8_t | ubBufferIdxV ) |
- Parameters
-
[in] ubPhyIfV Physical interface [in] ubBufferIdxV Buffer number
- Returns
trueif event was processed
The function processes a counter event for the physical CAN interface defined by ubPhyIfV and the mailbox number defined by ubBufferIdxV. If the physical interface is assigned to the DCL the counter variable is incremented. If the physical interface is assigned to the RCL the counter variable is decremented.
The function is implemented inside the CANpie FD driver and shall not be used by the Higher Layer Protocol.
◆ CpNrlMboxFlush()
| bool_t CpNrlMboxFlush | ( | CpPort_ts * | ptsPortV | ) |
- Parameters
-
[in] ptsPortV Pointer to CAN port structure
- Returns
trueif mailboxes are flushed
The function flushes the receive mailboxes of the Active CAN Line (ACL) after a Fault Detection event occurred. The value for the parameter ptsPortV defines which CAN port has to be flushed.
The function is implemented inside the CANpie FD driver and shall not be used by the Higher Layer Protocol.
◆ CpNrlMboxTickEvent()
| void CpNrlMboxTickEvent | ( | void | ) |
The function is called inside CpNrlTimerEvent() within the defined cycle period of CP_NRL_TIMER_PERIOD. Inside the CANpie FD driver the function is responsible to decrement the timer ticks associated to each mailbox.
The function is implemented inside the CANpie FD driver and shall not be used by the Higher Layer Protocol.
◆ CpNrlMboxTickLoad()
| bool_t CpNrlMboxTickLoad | ( | uint8_t | ubPhyIfV, |
| uint8_t | ubBufferIdxV ) |
- Parameters
-
[in] ubPhyIfV Physical interface [in] ubBufferIdxV Buffer number
- Returns
trueif timer tick was reloaded
The function reloads the timer ticks calculated by CpNrlSetTimeout() for the physical CAN interface defined by ubPhyIfV and the mailbox number defined by ubBufferIdxV. The timer ticks for each individual CAN interface and mailbox are decremented to 0 by CpNrlMboxTickEvent using a timer tick value of CP_NRL_TIMER_PERIOD.
The function is implemented inside the CANpie FD driver and shall not be used by the Higher Layer Protocol.
◆ CpNrlRegisterConnectionService()
| CpStatus_tv CpNrlRegisterConnectionService | ( | uint8_t | ubNrlChannelV, |
| uint32_t | ulIdentifierV, | ||
| uint8_t | ubFormatV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ulIdentifierV Identifier value [in] ubFormatV Message format
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
The function configures the NRL connection service for the the Network Redundancy Layer defined by ubNrlChannelV. The CAN-ID of the DCL is defined by parameter ulIdentifierV, which must be an even value. The CAN-ID of the RCL is set to a value of ulIdentifierV + 1.
◆ CpNrlRegisterDriver()
| CpStatus_tv CpNrlRegisterDriver | ( | uint8_t | ubNrlChannelV, |
| uint8_t | ubPhyIfDclV, | ||
| uint8_t | ubPhyIfRclV, | ||
| CpNrlDriver_ts * | ptsNrlDriverV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ubPhyIfDclV Physical interface of Default CAN Line [in] ubPhyIfRclV Physical interface of Redundant CAN Line [in] ptsNrlDriverV Pointer to NRL driver structure
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
The function registers the CANpie driver to the Network Redundancy Layer. It is assigned to the channel defined by ubNrlChannelV, the parameters ubPhyIfDclV and ubPhyIfRclV are used to assign the physical CAN interfaces of the driver to the Default CAN Line (DLC) and Redundant CAN Line (RCL).
The function requires that the CAN channels are not already assigned by another application. The CAN channels must not be equal. In addition, all functions of the CpNrlDriver_ts structure have to be assigned.
◆ CpNrlRegisterHandler()
| CpStatus_tv CpNrlRegisterHandler | ( | uint8_t | ubNrlChannelV, |
| CpNrlStateHandler_Fn | pfnStateHandlerV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] pfnStateHandlerV Pointer to callback function
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
This function will install a callback routine inside the NRL processing for the specified channel ubNrlChannelV. The handler is released by setting pfnStateHandlerV to NULL. A registered handler function is called upon state change of the NRL.
◆ CpNrlSendConnectionService()
| CpStatus_tv CpNrlSendConnectionService | ( | uint8_t | ubNrlChannelV | ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
This function triggers the transmission of the NRL connection service. The purpose of the function is verification of the CAN connection schema (DCL/RCL). Since the NRL connection service can modify the NRL state machine it shall be used sparingly.
◆ CpNrlSetDeviationLimit()
| CpStatus_tv CpNrlSetDeviationLimit | ( | uint8_t | ubNrlChannelV, |
| uint8_t | ubLimitV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ubLimitV Counter deviation limit value
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
This function configures the deviation limit value of the Network Redundancy Layer defined by ubNrlChannelV.
◆ CpNrlSetRecoveryTime()
| CpStatus_tv CpNrlSetRecoveryTime | ( | uint8_t | ubNrlChannelV, |
| uint32_t | ulMicroSecondsV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ulMicroSecondsV Timeout value in microseconds
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
This function configures the recovery timeout value for the specified channel ubNrlChannelV. The value ulMicroSecondsV is given in multiples of 1 micro-second.
◆ CpNrlSetTimeout()
| CpStatus_tv CpNrlSetTimeout | ( | uint8_t | ubNrlChannelV, |
| uint32_t | ulMicroSecondsV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ulMicroSecondsV Timeout value in microseconds
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
This function configures the mailbox timeout value for the specified channel ubNrlChannelV. The value ulMicroSecondsV is given in multiples of 1 micro-second.
◆ CpNrlState()
| CpStatus_tv CpNrlState | ( | uint8_t | ubNrlChannelV, |
| CpNrlState_ts * | ptsStateV ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer [in] ptsStateV Pointer to NRL state structure
- Returns
- Error code defined by the CpErr_e enumeration. If no error occurred, the function will return the value
eCP_ERR_NONE.
This function retrieves the present state of the NRL channel defined by ubNrlChannelV. The parameter ptsStateV is a pointer to a memory location where the function will store the state.
◆ CpNrlTimerEvent()
| void CpNrlTimerEvent | ( | uint8_t | ubNrlChannelV | ) |
- Parameters
-
[in] ubNrlChannelV Channel of Network Redundancy Layer
This function must be called cyclically by a timer resource of the target system. It is responsible to execute the internal NRL process for the channel defined by ubNrlChannelV. The cycle time is defined in microseconds by the symbol CP_NRL_TIMER_PERIOD.
Variable Documentation
◆ tsNrlDriverG
|
extern |
The global structure for CANpie FD driver registration is typically defined inside the specific CANpie FD driver implementation. The variable can be used inside the application during initialisation if no other approach is used.