Detailed Description
The CANopen Network Management (NMT) is used to change the state of a CANopen slave node. In addition, the network state can be monitored via the Network Management Error Control (NMT-EC) service. This module provides the following functionality:
- NMT state change
- NMT Error Control (heartbeat)
- Send boot-up message
- Callbacks for NMT state change
 Include dependency graph for cbl_nmt.h:
Include dependency graph for cbl_nmt.h: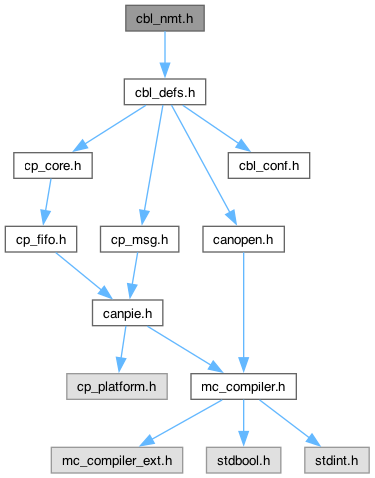
Macros | |
| #define | NODE_STATE_BOOTUP 0x00 |
| #define | NODE_STATE_STOPPED 0x04 |
| #define | NODE_STATE_OPERATIONAL 0x05 |
| #define | NODE_STATE_PREOPERATIONAL 0x7F |
| #define | NODE_STATE_BUS_OFF 0xFF |
Functions | |
| uint8_t | CblNmtGetNodeState (void) |
| void | CblNmtEventStart (void) |
| void | CblNmtEventStop (void) |
| void | CblNmtEventPreOperational (void) |
| void | CblNmtSetHeartbeatProd (uint16_t uwTimeV) |
Function Documentation
◆ CblNmtEventPreOperational()
| void CblNmtEventPreOperational | ( | void | ) |
- Note
- Adopt this function to the application if required. The function implementation is located in the file
cbl_user.c.
This service routine is called when the NMT state machine changes into NMT pre-operational state (NODE_STATE_PREOPERATIONAL). It can be used to perform device specific routines after reception of the NMT command.
◆ CblNmtEventStart()
| void CblNmtEventStart | ( | void | ) |
- Note
- Adopt this function to the application if required. The function implementation is located in the file
cbl_user.c.
This service routine is called when the NMT state machine changes into NMT operational state (NODE_STATE_OPERATIONAL). It can be used to perform device specific routines after reception of the NMT command.
◆ CblNmtEventStop()
| void CblNmtEventStop | ( | void | ) |
- Note
- Adopt this function to the application if required. The function implementation is located in the file
cbl_user.c.
This service routine is called when the NMT state machine changes into NMT stopped state (NODE_STATE_STOPPED). It can be used to perform device specific routines after reception of the NMT command.
◆ CblNmtGetNodeState()
| uint8_t CblNmtGetNodeState | ( | void | ) |
- Returns
- NMT node state
This function returns the current NMT state of the node. Possible return values are defined by NMT node state.
◆ CblNmtSetHeartbeatProd()
| void CblNmtSetHeartbeatProd | ( | uint16_t | uwTimeV | ) |
- Parameters
-
[in] uwTimeV heartbeat cycle time
This function sets the heartbeat producer time. The parameter uwTimeV denotes the time in milli-seconds. By default, the heartbeat producer time is set to 0 during initialization.